关键词:时延, 惯性时延
连续赋值延时语句中的延时,用于控制任意操作数发生变化到语句左端赋予新值之间的时间延时。
时延一般是不可综合的。
寄存器的时延也是可以控制的,这部分在时序控制里加以说明。
连续赋值时延一般可分为普通赋值时延、隐式时延、声明时延。
下面 3 个例子实现的功能是等效的,分别对应 3 种不同连续赋值时延的写法。
//普通时延,A&B计算结果延时10个时间单位赋值给Z
wire Z, A, B ;
assign #10 Z = A & B ;
//隐式时延,声明一个wire型变量时对其进行包含一定时延的连续赋值。
wire A, B;
wire #10 Z = A & B;
//声明时延,声明一个wire型变量是指定一个时延。因此对该变量所有的连续赋值都会被推迟到指定的时间。除非门级建模中,一般不推荐使用此类方法建模。
wire A, B;
wire #10 Z ;
assign Z =A & B
惯性时延
在上述例子中,A 或 B 任意一个变量发生变化,那么在 Z 得到新的值之前,会有 10 个时间单位的时延。如果在这 10 个时间单位内,即在 Z 获取新的值之前,A 或 B 任意一个值又发生了变化,那么计算 Z 的新值时会取 A 或 B 当前的新值。所以称之为惯性时延,即信号脉冲宽度小于时延时,对输出没有影响。
因此仿真时,时延一定要合理设置,防止某些信号不能进行有效的延迟。
对一个有延迟的与门逻辑进行时延仿真。
实例
module time_delay_module(
input ai, bi,
output so_lose, so_get, so_normal);
assign #20 so_lose = ai & bi ;
assign #5 so_get = ai & bi ;
assign so_normal = ai & bi ;
endmodule
module time_delay_module(
input ai, bi,
output so_lose, so_get, so_normal);
assign #20 so_lose = ai & bi ;
assign #5 so_get = ai & bi ;
assign so_normal = ai & bi ;
endmodule
testbench 参考如下:
实例
`timescale 1ns/1ns
module test ;
reg ai, bi ;
wire so_lose, so_get, so_normal ;
initial begin
ai = 0 ;
#25 ; ai = 1 ;
#35 ; ai = 0 ; //60ns
#40 ; ai = 1 ; //100ns
#10 ; ai = 0 ; //110ns
end
initial begin
bi = 1 ;
#70 ; bi = 0 ;
#20 ; bi = 1 ;
end
time_delay_module u_wire_delay(
.ai (ai),
.bi (bi),
.so_lose (so_lose),
.so_get (so_get),
.so_normal (so_normal));
initial begin
forever begin
#100;
//$display("---gyc---%d", $time);
if ($time >= 1000) begin
$finish ;
end
end
end
endmodule
`timescale 1ns/1ns
module test ;
reg ai, bi ;
wire so_lose, so_get, so_normal ;
initial begin
ai = 0 ;
#25 ; ai = 1 ;
#35 ; ai = 0 ; //60ns
#40 ; ai = 1 ; //100ns
#10 ; ai = 0 ; //110ns
end
initial begin
bi = 1 ;
#70 ; bi = 0 ;
#20 ; bi = 1 ;
end
time_delay_module u_wire_delay(
.ai (ai),
.bi (bi),
.so_lose (so_lose),
.so_get (so_get),
.so_normal (so_normal));
initial begin
forever begin
#100;
//$display("---gyc---%d", $time);
if ($time >= 1000) begin
$finish ;
end
end
end
endmodule
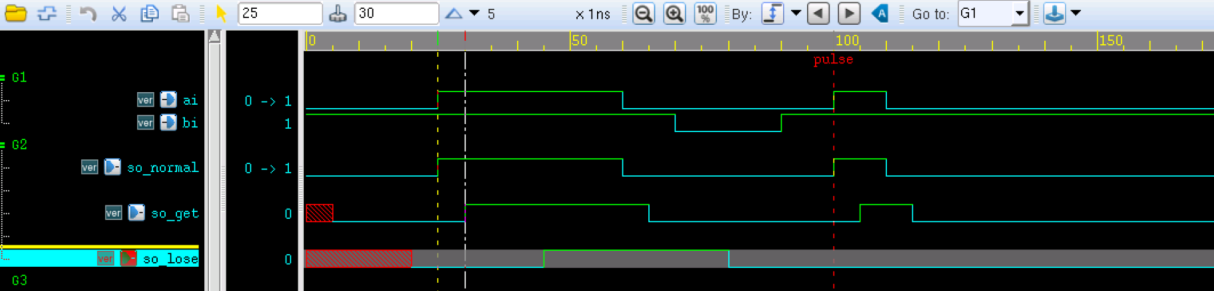
仿真结果如下:
信号 so_normal 为正常的与逻辑。
由于所有的时延均大于 5ns,所以信号 so_get 的结果为与操作后再延迟 5ns 的结果。
信号 so_lose 前一段是与操作后再延迟 20ns 的结果。
由于信号 ai 第二个高电平持续时间小于 20ns,so_lose 信号会因惯性时延而漏掉对这个脉冲的延时检测,所以后半段 so_lose 信号仍然为 0。