本节引言:
在上一节中我们中我们对传感器的一些基本概念进行了学习,以及学习了使用传感器的套路,本节给大家带来的传感器是方向传感器的用法,好的,开始本节内容~
1.三维坐标系的概念:
在Android平台中,传感器框架通常是使用一个标准的三维坐标系来表示一个值的。以本节要讲的方向传感器为例子,确定一个方向也需要一个三维坐标,毕竟我们的设备不可能永远都是水平端着的吧,安卓给我们返回的方向值就是一个长度为3的flaot数组,包含三个方向的值!官方API文档中有这样一个图:sensors_overview
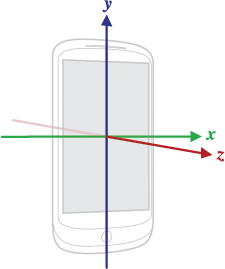
如果你看不懂图,那么写下文字解释:
- X轴的方向:沿着屏幕水平方向从左到右,如果手机如果不是是正方形的话,较短的边需要水平放置,较长的边需要垂直放置。
- Y轴的方向:从屏幕的左下角开始沿着屏幕的的垂直方向指向屏幕的顶端
- Z轴的方向:当水平放置时,指向天空的方向
2.方向传感器的三个值
上一节中说了,传感器的回调方法:onSensorChanged中的参数SensorEvent event,event的值类型是Float[]的,而且最多只有三个元素,而方向传感器则刚好有三个元素,都表示度数!对应的含义如下:
values[0]:方位角,手机绕着Z轴旋转的角度。0表示正北(North),90表示正东(East),180表示正南(South),270表示正西(West)。假如values[0]的值刚好是这四个值的话,并且手机沿水平放置的话,那么当前手机的正前方就是这四个方向,可以利用这一点来写一个指南针!
values[1]:倾斜角,手机翘起来的程度,当手机绕着x轴倾斜时该值会发生变化。取值范围是[-180,180]之间。假如把手机放在桌面上,而桌面是完全水平的话,values1的则应该是0,当然很少桌子是绝对水平的。从手机顶部开始抬起,直到手机沿着x轴旋转180(此时屏幕乡下水平放在桌面上)。在这个旋转过程中,values[1]的值会从0到-180之间变化,即手机抬起时,values1的值会逐渐变小,知道等于-180;而加入从手机底部开始抬起,直到手机沿着x轴旋转180度,此时values[1]的值会从0到180之间变化。我们可以利用value[1]的这个特性结合value[2]来实现一个平地尺!
value[2]:滚动角,沿着Y轴的滚动角度,取值范围为:[-90,90],假设将手机屏幕朝上水平放在桌面上,这时如果桌面是平的,values2的值应为0。将手机从左侧逐渐抬起,values[2]的值将逐渐减小,知道垂直于手机放置,此时values[2]的值为-90,从右侧则是0-90;加入在垂直位置时继续向右或者向左滚动,values[2]的值将会继续在-90到90之间变化!
假如你不是很懂,没事我们写个demo验证下就知道了~
3.简单的Demo帮助我们理解这三个值的变化:
运行效果图:
实现代码:
布局代码:activity_main.xml:
<LinearLayout xmlns:android="http://schemas.android.com/apk/res/android"
android:layout_width="match_parent"
android:layout_height="match_parent"
android:orientation="vertical"
android:padding="5dp">
<TextView
android:id="@+id/tv_value1"
android:layout_width="wrap_content"
android:layout_height="wrap_content"
android:layout_marginTop="10dp"
android:text="方位角"
android:textSize="18sp"
android:textStyle="bold" />
<TextView
android:id="@+id/tv_value2"
android:layout_width="wrap_content"
android:layout_height="wrap_content"
android:layout_marginTop="10dp"
android:text="倾斜角"
android:textSize="18sp"
android:textStyle="bold" />
<TextView
android:id="@+id/tv_value3"
android:layout_width="wrap_content"
android:layout_height="wrap_content"
android:layout_marginTop="10dp"
android:text="滚动角"
android:textSize="18sp"
android:textStyle="bold" />
</LinearLayout>
MainActivity.java:
public class MainActivity extends AppCompatActivity implements SensorEventListener {
private TextView tv_value1;
private TextView tv_value2;
private TextView tv_value3;
private SensorManager sManager;
private Sensor mSensorOrientation;
@Override
protected void onCreate(Bundle savedInstanceState) {
super.onCreate(savedInstanceState);
setContentView(R.layout.activity_main);
sManager = (SensorManager) getSystemService(SENSOR_SERVICE);
mSensorOrientation = sManager.getDefaultSensor(Sensor.TYPE_ORIENTATION);
sManager.registerListener(this, mSensorOrientation, SensorManager.SENSOR_DELAY_UI);
bindViews();
}
private void bindViews() {
tv_value1 = (TextView) findViewById(R.id.tv_value1);
tv_value2 = (TextView) findViewById(R.id.tv_value2);
tv_value3 = (TextView) findViewById(R.id.tv_value3);
}
@Override
public void onSensorChanged(SensorEvent event) {
tv_value1.setText("方位角:" + (float) (Math.round(event.values[0] * 100)) / 100);
tv_value2.setText("倾斜角:" + (float) (Math.round(event.values[1] * 100)) / 100);
tv_value3.setText("滚动角:" + (float) (Math.round(event.values[2] * 100)) / 100);
}
@Override
public void onAccuracyChanged(Sensor sensor, int accuracy) {
}
}
代码非常简单~,你想真正体验下这三个值的变化,自己运行下程序转转手机就知道了~
4.一个简易版的文字指南针示例
下面我们来写个简单的文字版的指南针来体验体验,当文字显示正南的时候,表示手机的正前方就是南方!
运行效果图:
代码实现:
自定义View:CompassView.java
/**
* Created by Jay on 2015/11/14 0014.
*/
public class CompassView extends View implements Runnable{
private Paint mTextPaint;
private int sWidth,sHeight;
private float dec = 0.0f;
private String msg = "正北 0°";
public CompassView(Context context) {
this(context, null);
}
public CompassView(Context context, AttributeSet attrs) {
super(context, attrs);
sWidth = ScreenUtil.getScreenW(context);
sHeight = ScreenUtil.getScreenH(context);
init();
new Thread(this).start();
}
public CompassView(Context context, AttributeSet attrs, int defStyleAttr) {
super(context, attrs, defStyleAttr);
}
private void init() {
mTextPaint = new Paint();
mTextPaint.setColor(Color.GRAY);
mTextPaint.setTextSize(64);
mTextPaint.setStyle(Paint.Style.FILL);
}
@Override
protected void onDraw(Canvas canvas) {
super.onDraw(canvas);
canvas.drawText(msg, sWidth / 4 , sWidth / 2, mTextPaint);
}
// 更新指南针角度
public void setDegree(float degree)
{
// 设置灵敏度
if(Math.abs(dec - degree) >= 2 )
{
dec = degree;
int range = 22;
String degreeStr = String.valueOf(dec);
// 指向正北
if(dec > 360 - range && dec < 360 + range)
{
msg = "正北 " + degreeStr + "°";
}
// 指向正东
if(dec > 90 - range && dec < 90 + range)
{
msg = "正东 " + degreeStr + "°";
}
// 指向正南
if(dec > 180 - range && dec < 180 + range)
{
msg = "正南 " + degreeStr + "°";
}
// 指向正西
if(dec > 270 - range && dec < 270 + range)
{
msg = "正西 " + degreeStr + "°";
}
// 指向东北
if(dec > 45 - range && dec < 45 + range)
{
msg = "东北 " + degreeStr + "°";
}
// 指向东南
if(dec > 135 - range && dec < 135 + range)
{
msg = "东南 " + degreeStr + "°";
}
// 指向西南
if(dec > 225 - range && dec < 225 + range)
{
msg = "西南 " + degreeStr + "°";
}
// 指向西北
if(dec > 315 - range && dec < 315 + range)
{
msg = "西北 " + degreeStr + "°";
}
}
}
@Override
public void run() {
while(!Thread.currentThread().isInterrupted())
{
try
{
Thread.sleep(100);
}
catch(InterruptedException e)
{
Thread.currentThread().interrupt();
}
postInvalidate();
}
}
}
MainActivity.java:
public class MainActivity extends AppCompatActivity implements SensorEventListener {
private CompassView cView;
private SensorManager sManager;
private Sensor mSensorOrientation;
@Override
protected void onCreate(Bundle savedInstanceState) {
super.onCreate(savedInstanceState);
cView = new CompassView(MainActivity.this);
sManager = (SensorManager) getSystemService(SENSOR_SERVICE);
mSensorOrientation = sManager.getDefaultSensor(Sensor.TYPE_ORIENTATION);
sManager.registerListener(this, mSensorOrientation, SensorManager.SENSOR_DELAY_UI);
setContentView(cView);
}
@Override
public void onSensorChanged(SensorEvent event) {
cView.setDegree(event.values[0]);
}
@Override
public void onAccuracyChanged(Sensor sensor, int accuracy) {
}
@Override
protected void onDestroy() {
super.onDestroy();
sManager.unregisterListener(this);
}
}这就是一个很简单的指南针的雏形了,有兴趣的可以自己绘制个罗盘和指针,然后实现一个好看的指南针~
5.本节示例代码下载:
本节小结:
好的,本节给大家介绍了Android中最常用的方向传感器,以及他的简单用法,以及写了一个指南针的例子,而完成指南针我们只用到一个values[0]的值,利用其他两个值我们还可以用来测量某地是否平躺,即制作水平尺,有空的可以写个来玩玩~好的,就到这里,谢谢~
